我的机器人项目集锦
在机器人开发的道路上,我完成了多个有趣的项目。这篇文章将展示我的主要作品和开发心得。
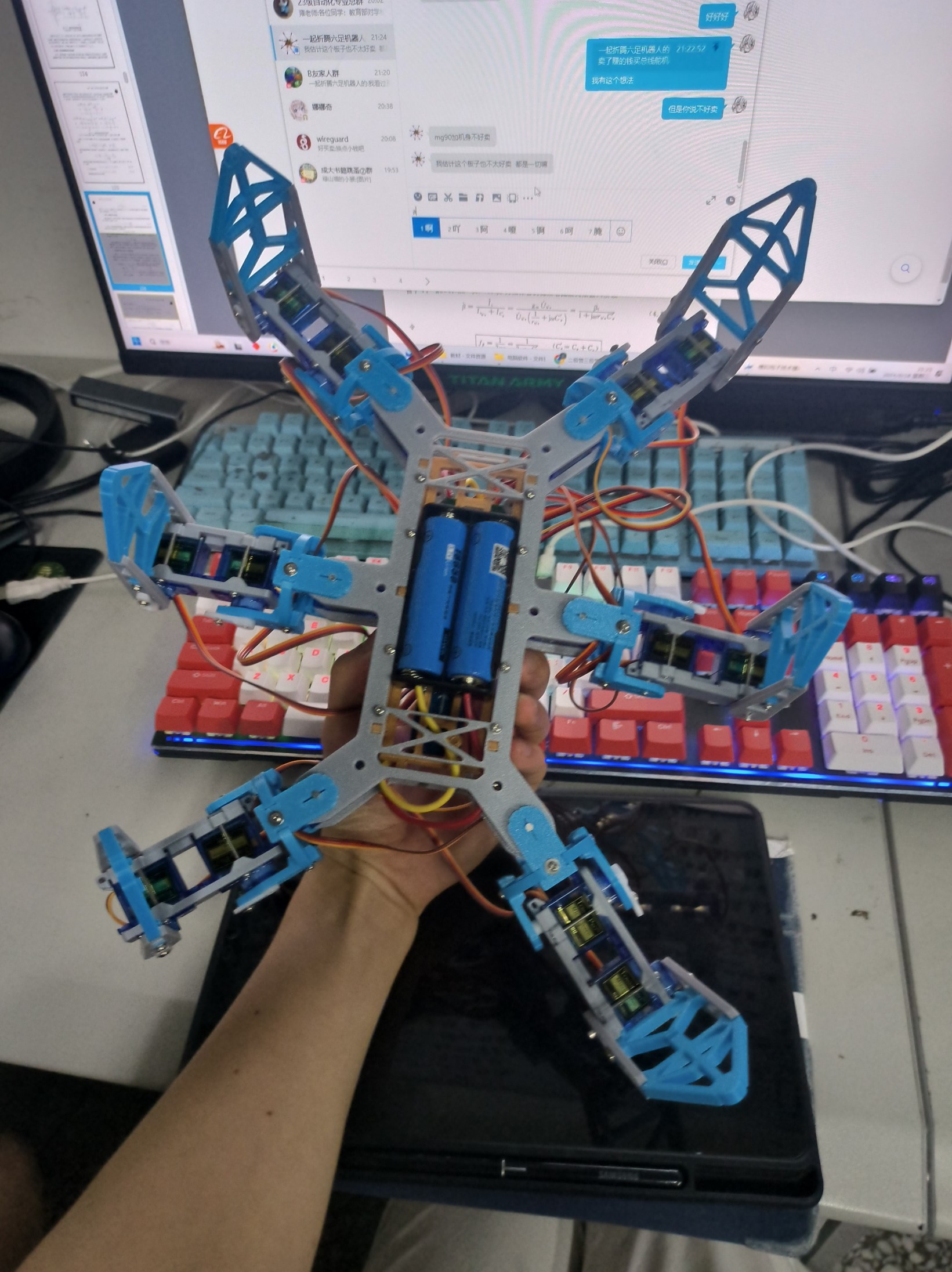
🦾 六足步行机器人
项目概述
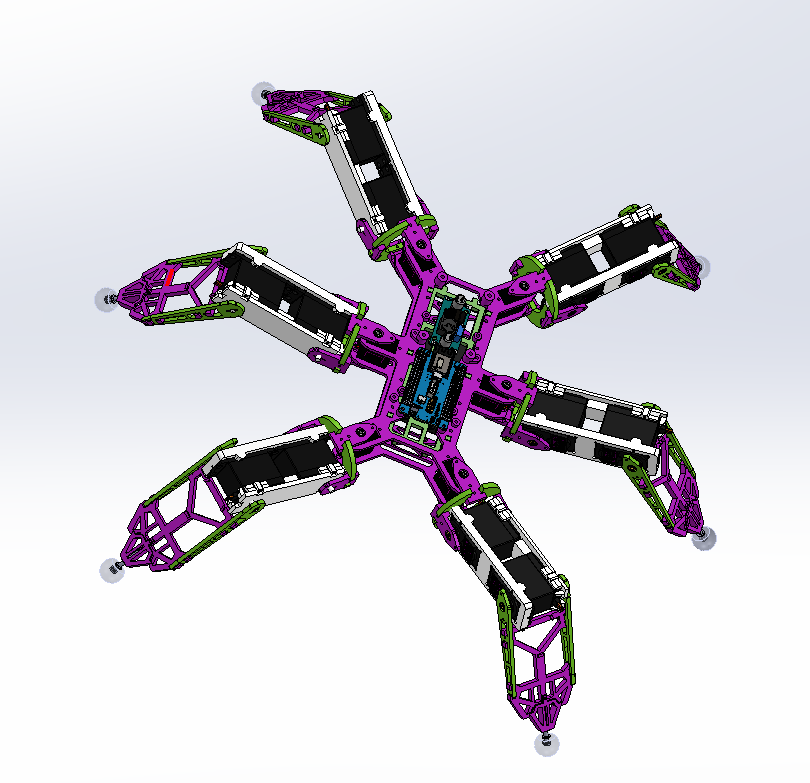
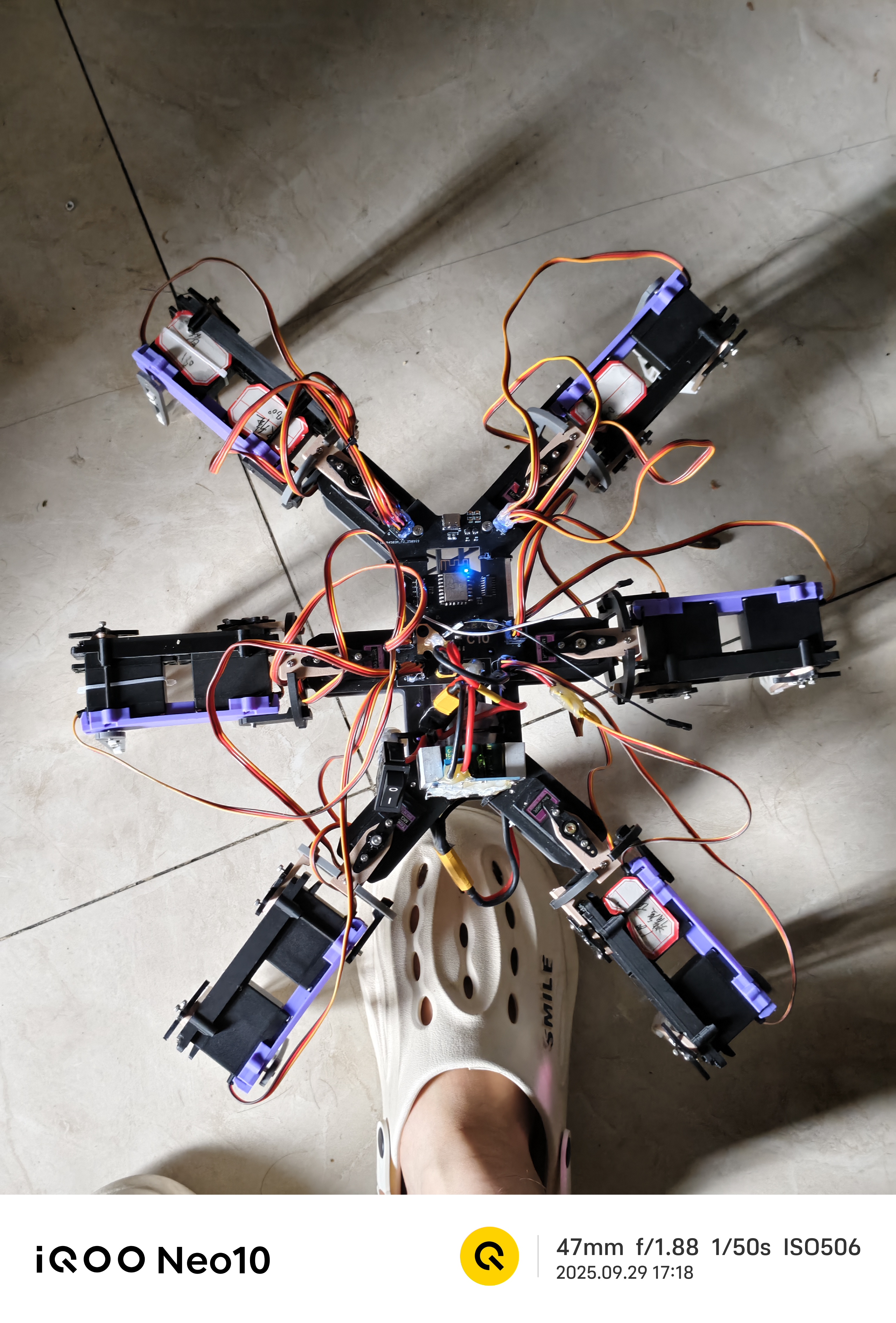
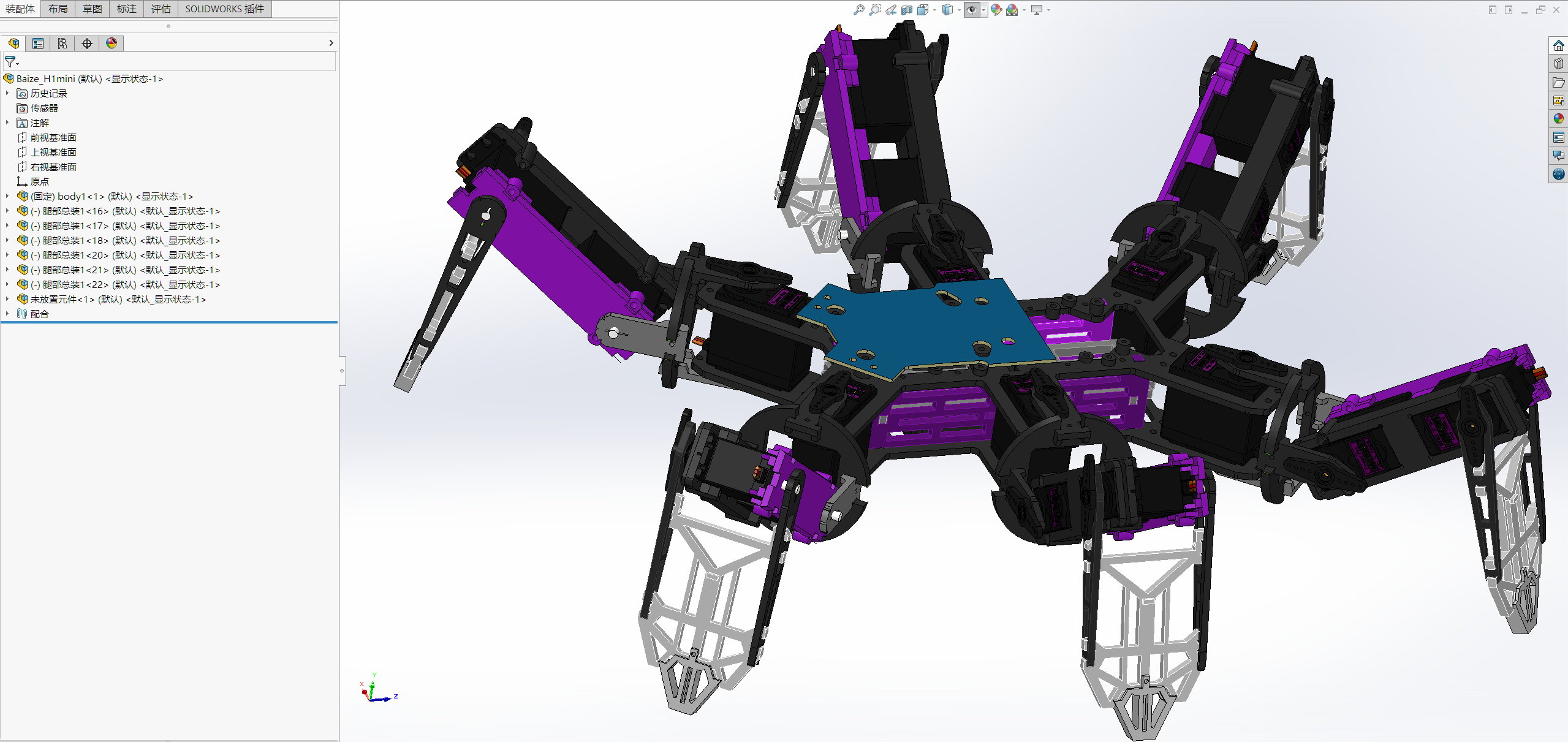
基于Arduino和ROS开发的六足步行机器人,这是我最引以为傲的项目之一。从机械设计到软件控制,完整实现了一个可以自主行走的仿生机器人。
技术特点
- 多种步态算法:实现了三角步态、波浪步态等多种运动模式
- 自主避障:集成超声波传感器,实现实时避障功能
- 3D建模设计:使用SolidWorks进行机械结构设计
- ROS集成:通过ROS实现模块化控制架构
开发过程
1. 机械设计阶段
使用3D建模软件设计机器人结构,确保各关节运动范围合理。
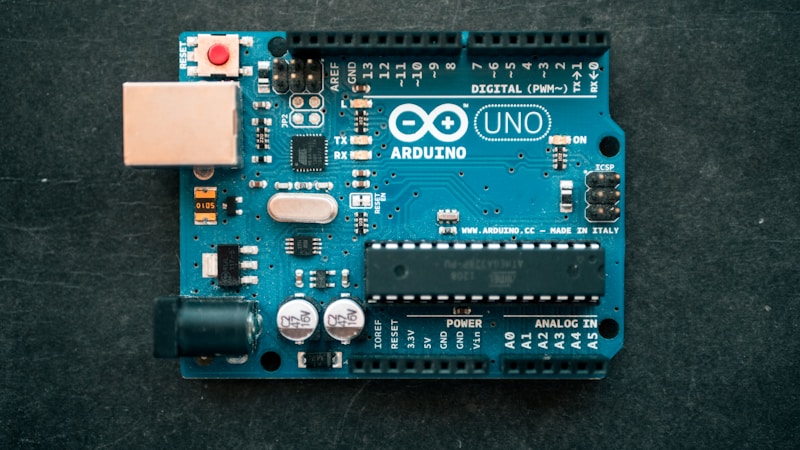
2. 硬件组装
选用高扭矩舵机,搭配Arduino控制板,完成硬件集成。

3. 软件开发
编写运动学模型和步态控制算法,实现平稳行走。
项目成果
经过多次迭代和优化,机器人已经能够在复杂地形上稳定行走,并具备基本的自主导航能力。
🎯 RoboMaster 哨兵机器人
项目背景
参加RoboMaster机器人大赛,负责哨兵机器人的视觉识别和自动瞄准系统开发。
核心功能
- 目标识别:使用深度学习进行敌方机器人检测
- 自动瞄准:PID控制实现精准打击
- 多传感器融合:结合视觉和IMU数据提高稳定性

技术亮点
- 实时图像处理:优化算法达到30fps处理速度
- 弹道补偿:考虑重力和空气阻力的弹道模型
- 云台控制:双轴云台高速响应控制
💡 经验总结
通过这些项目,我深刻体会到:
- 理论与实践相结合的重要性
- 迭代开发和持续优化的必要性
- 团队协作在复杂项目中的价值
希望这些经验能够帮助到同样热爱机器人开发的朋友们!
如果你对这些项目感兴趣,欢迎通过关于页面联系我交流探讨。
All articles on this blog are licensed under CC BY-NC-SA 4.0 unless otherwise stated.