c10
机器人开发者 / 技术爱好者 / 摄影师
👋 个人简介
你好!我是 c10,一名热衷于机器人技术和人工智能的开发者。
我对机器人控制、计算机视觉、嵌入式系统开发有着浓厚的兴趣,并积极参与各类机器人竞赛和开源项目。在业余时间,我也喜欢摄影创作和技术写作。
我相信技术可以改变生活,也希望通过这个博客分享我的学习经验和项目心得,与志同道合的朋友交流探讨。
💻 技能树
编程语言
- C/C++
- Python
- JavaScript
- MATLAB
机器人技术
- ROS/ROS2
- 运动控制
- 路径规划
- SLAM
嵌入式开发
- STM32
- Arduino
- 树莓派
- RTOS
计算机视觉
- OpenCV
- 目标检测
- 图像处理
- 深度学习
工具与平台
- Git/GitHub
- Linux
- Docker
- CMake
其他技能
- 3D建模
- PCB设计
- 摄影后期
- 技术写作
🎯 项目经历
2024 - 至今
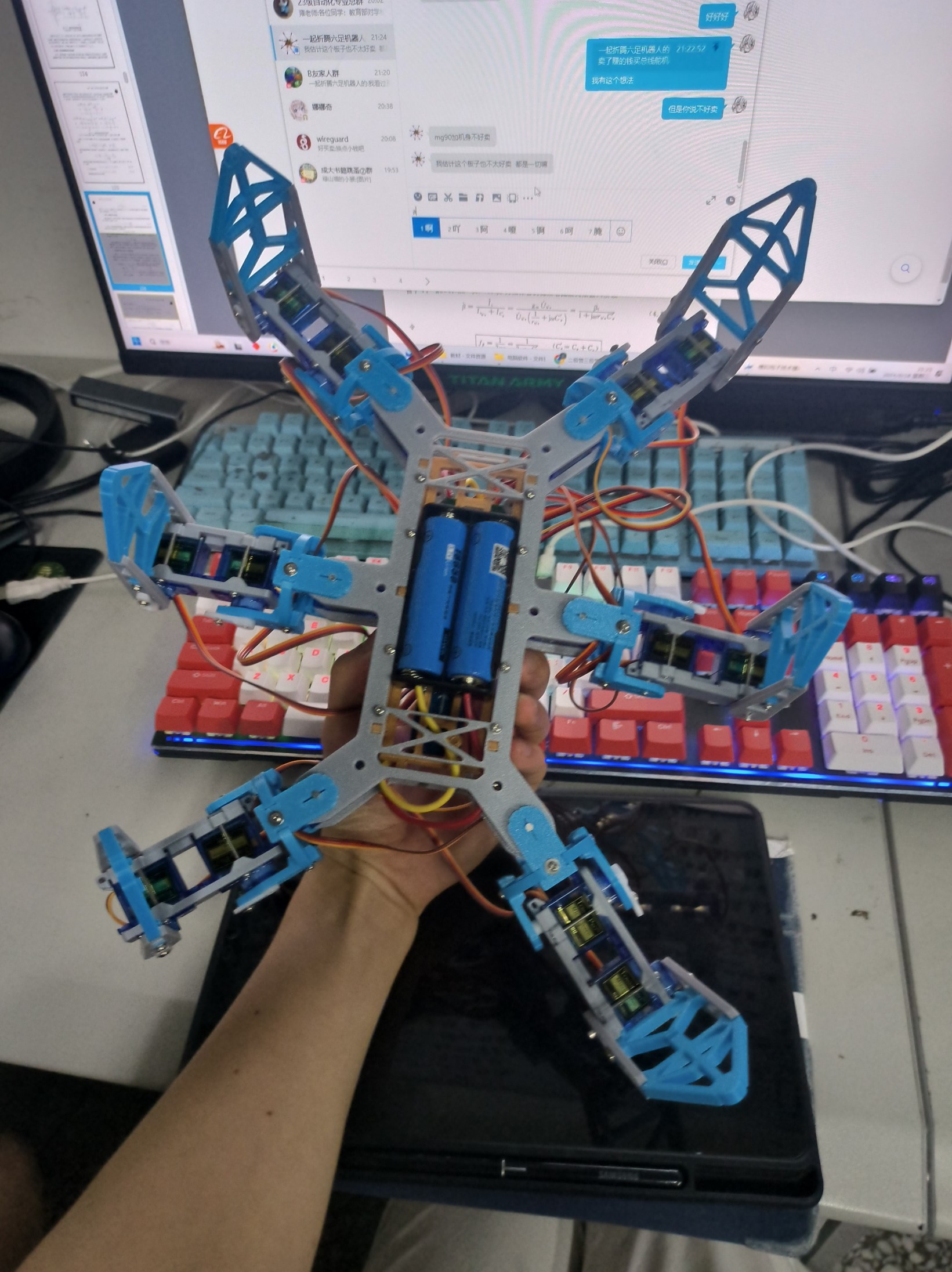
六足步行机器人
基于Arduino和ROS开发的六足机器人平台,实现了多种步态算法(三角步态、波浪步态等)和自主避障功能。项目涉及运动学建模、传感器融合和实时控制系统设计。
基于Arduino和ROS开发的六足机器人平台,实现了多种步态算法(三角步态、波浪步态等)和自主避障功能。项目涉及运动学建模、传感器融合和实时控制系统设计。
2023 - 2024
RoboMaster 哨兵机器人
参与RoboMaster比赛的哨兵机器人开发,负责视觉识别模块和自动瞄准系统。使用深度学习进行目标检测,结合PID控制实现精准打击。
参与RoboMaster比赛的哨兵机器人开发,负责视觉识别模块和自动瞄准系统。使用深度学习进行目标检测,结合PID控制实现精准打击。
2023
个人博客搭建
使用Hexo + Butterfly主题搭建个人技术博客,用于分享学习笔记和项目经验。部署在GitHub Pages上,实现了自动化部署流程。
使用Hexo + Butterfly主题搭建个人技术博客,用于分享学习笔记和项目经验。部署在GitHub Pages上,实现了自动化部署流程。
📧 联系方式
💡 "Stay hungry, stay foolish."
欢迎与我交流技术、分享经验!