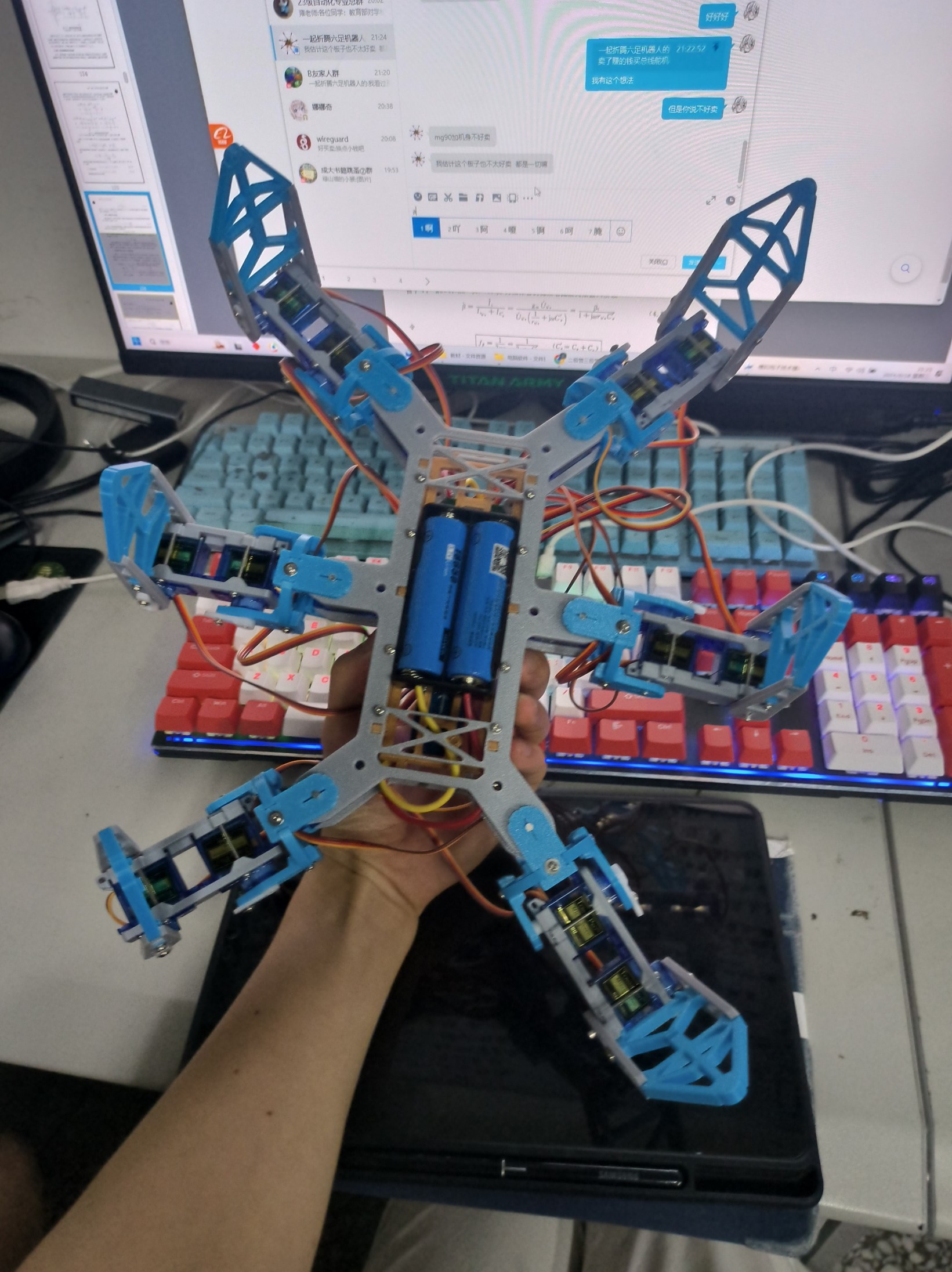
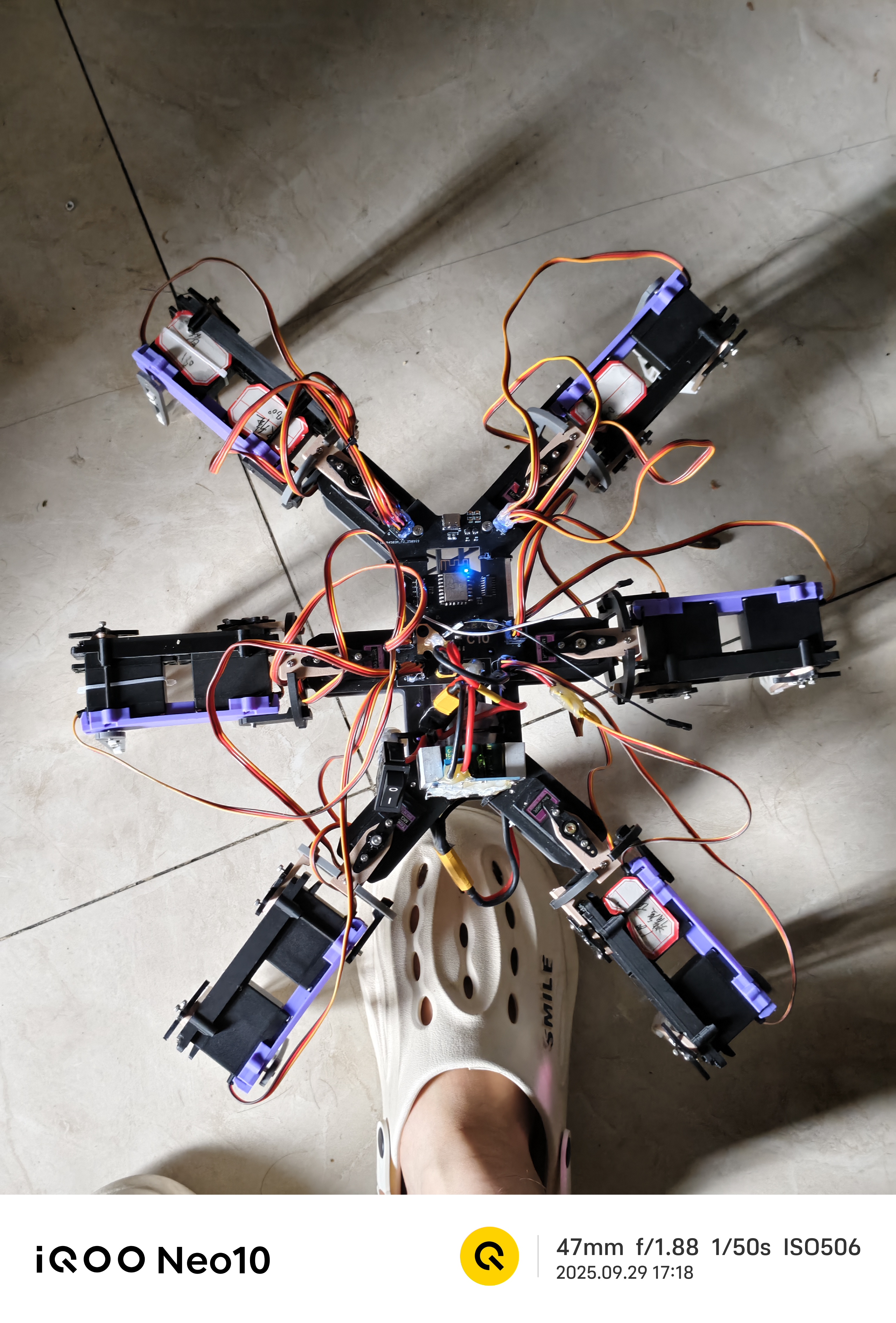
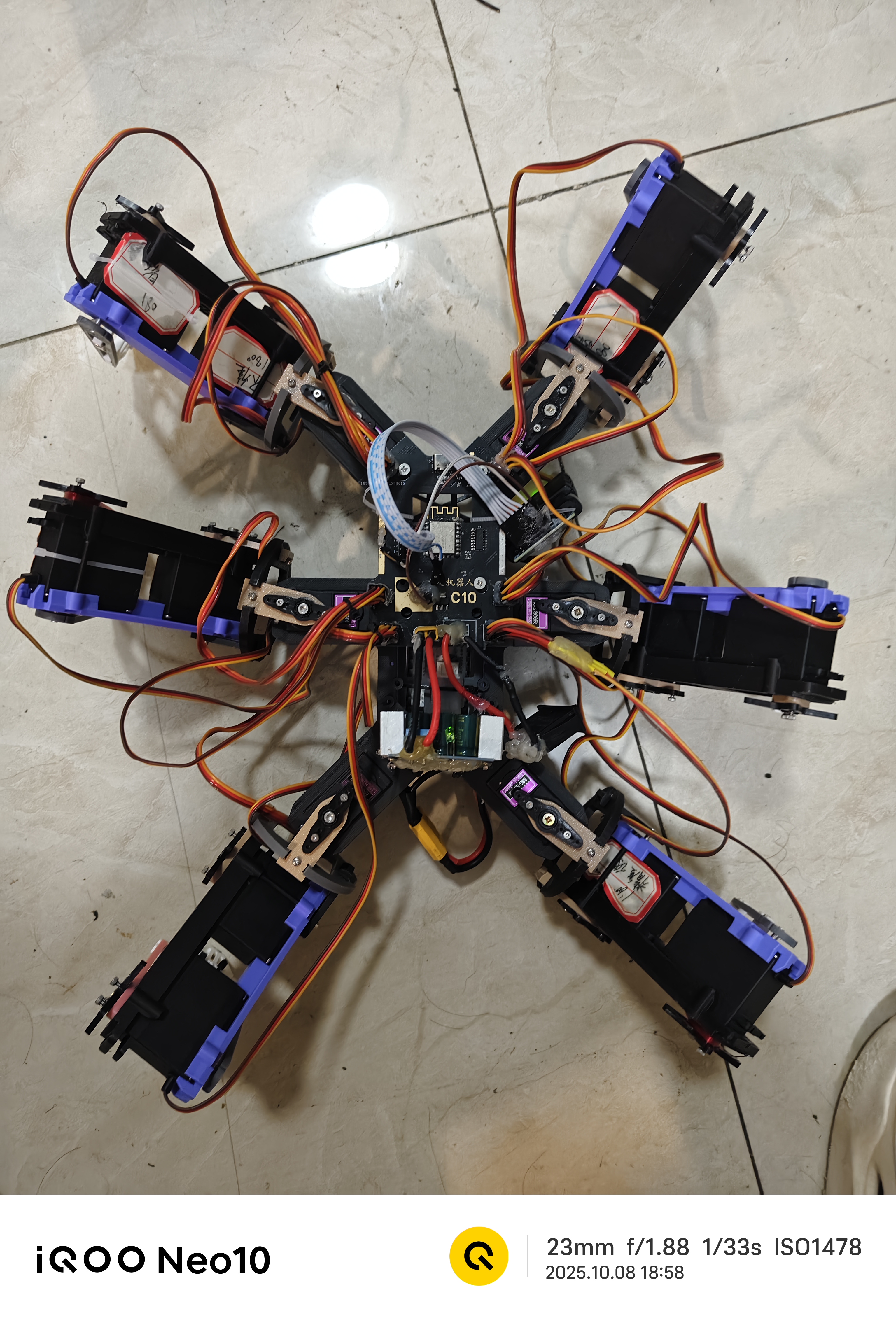
🦾 六足步行机器人
仿生机器人的经典之作,18个自由度的六足平台,
实现了多种步态和复杂地形适应能力。
项目起源
六足机器人是我个人最喜欢的项目之一。从3D建模设计到运动学编程,完整体验了一个仿生机器人的诞生过程。
机械设计
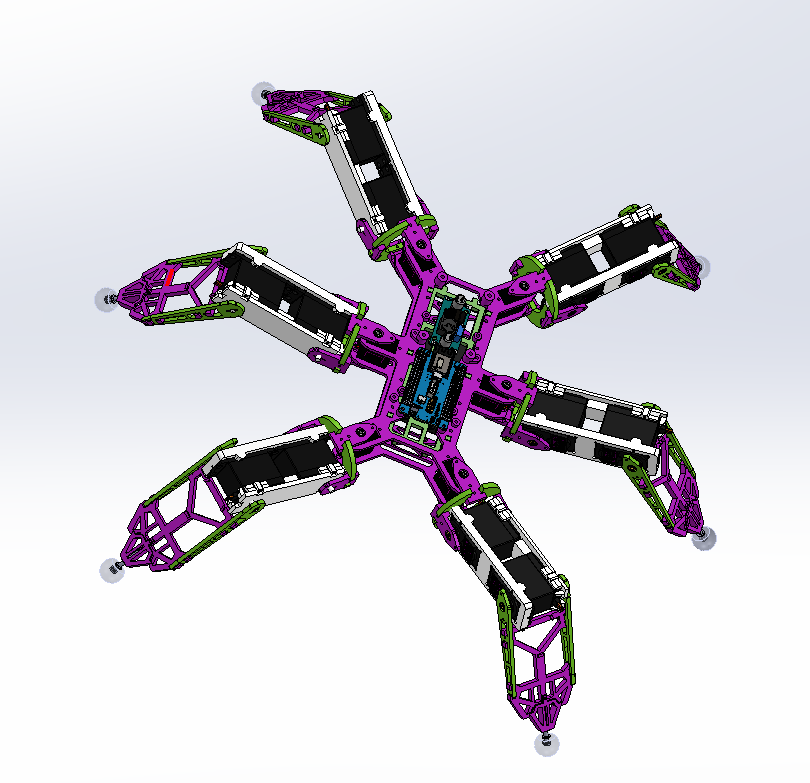
3D建模
使用 SolidWorks 进行精确建模,确保:
- 关节运动范围合理(±60°)
- 重心位置平衡
- 结构强度满足要求
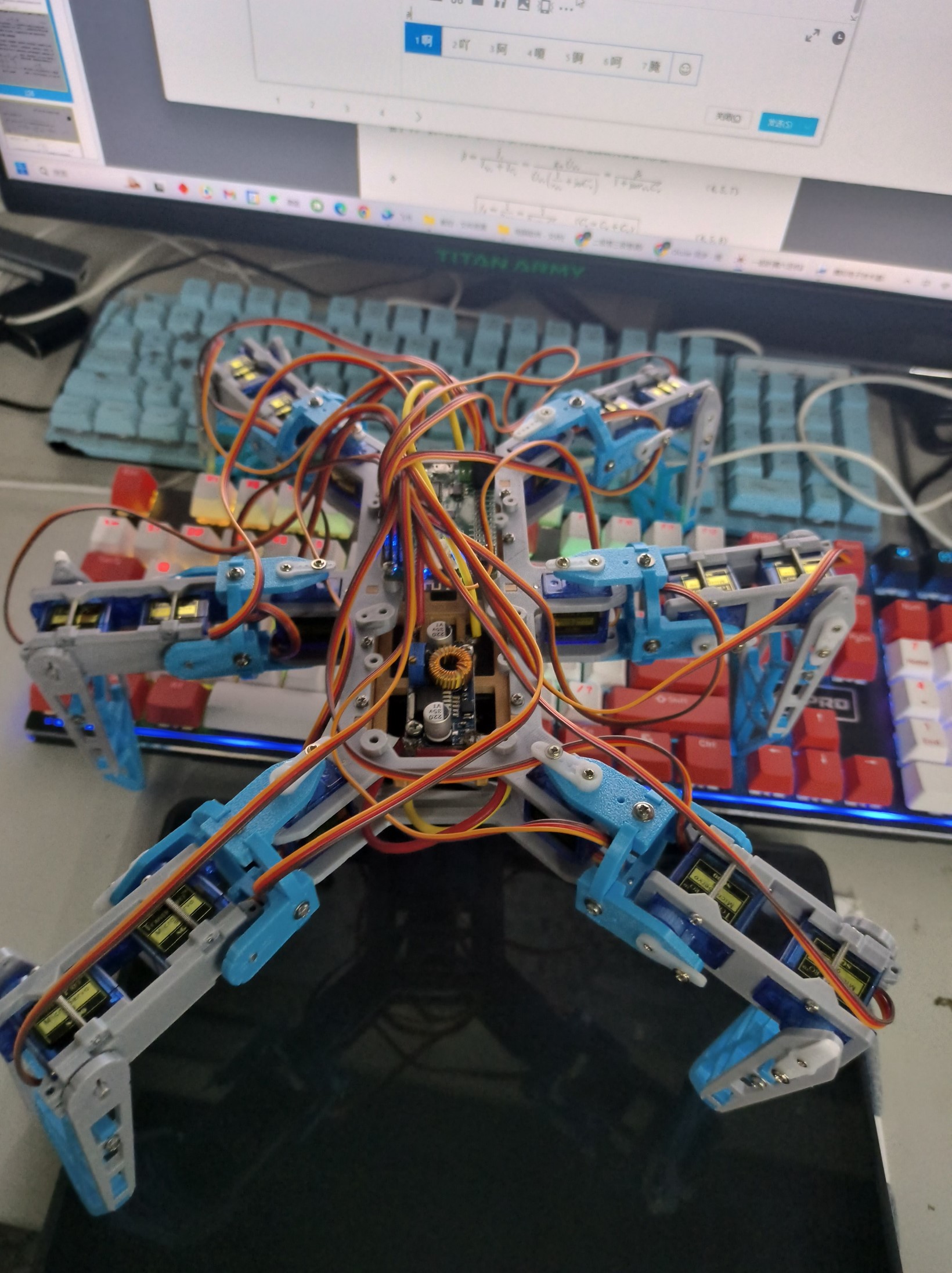
材料选择
- 机身:碳纤维板(轻量化)
- 关节:高强度尼龙(耐磨)
- 舵机:MG996R(扭矩大)
运动学分析
正向运动学
根据关节角度计算足端位置:
1 | def forward_kinematics(theta1, theta2, theta3): |
逆向运动学
给定足端位置,求解关节角度(使用几何法 + 迭代优化)
步态算法
1. 三角步态
最稳定的步态,始终保持3只脚着地:
- 奇数腿组(1,3,5)同时抬起
- 偶数腿组(2,4,6)保持支撑
- 交替进行,形成稳定行走
2. 波浪步态
更加灵活,适合快速移动:
- 腿部依次抬起(1→2→3→4→5→6)
- 形成波浪状运动
- 速度快但稳定性略低
3. 自适应步态
根据地形自动调整:
- 平坦地面:使用快速波浪步态
- 崎岖地形:切换稳定三角步态
- 障碍物前:启动跨越步态
控制系统
硬件架构
- 主控:Arduino Mega 2560
- 舵机驱动:PCA9685(16通道PWM)
- 传感器:
- 超声波(避障)
- 陀螺仪(姿态)
- 触觉传感器(足端压力)
软件架构
1 | 主控制循环 |
项目成果
经过多次迭代优化:
改进前:
- 行走不稳定,容易摔倒
- 耗电量大,续航短
- 对地形适应能力差
改进后: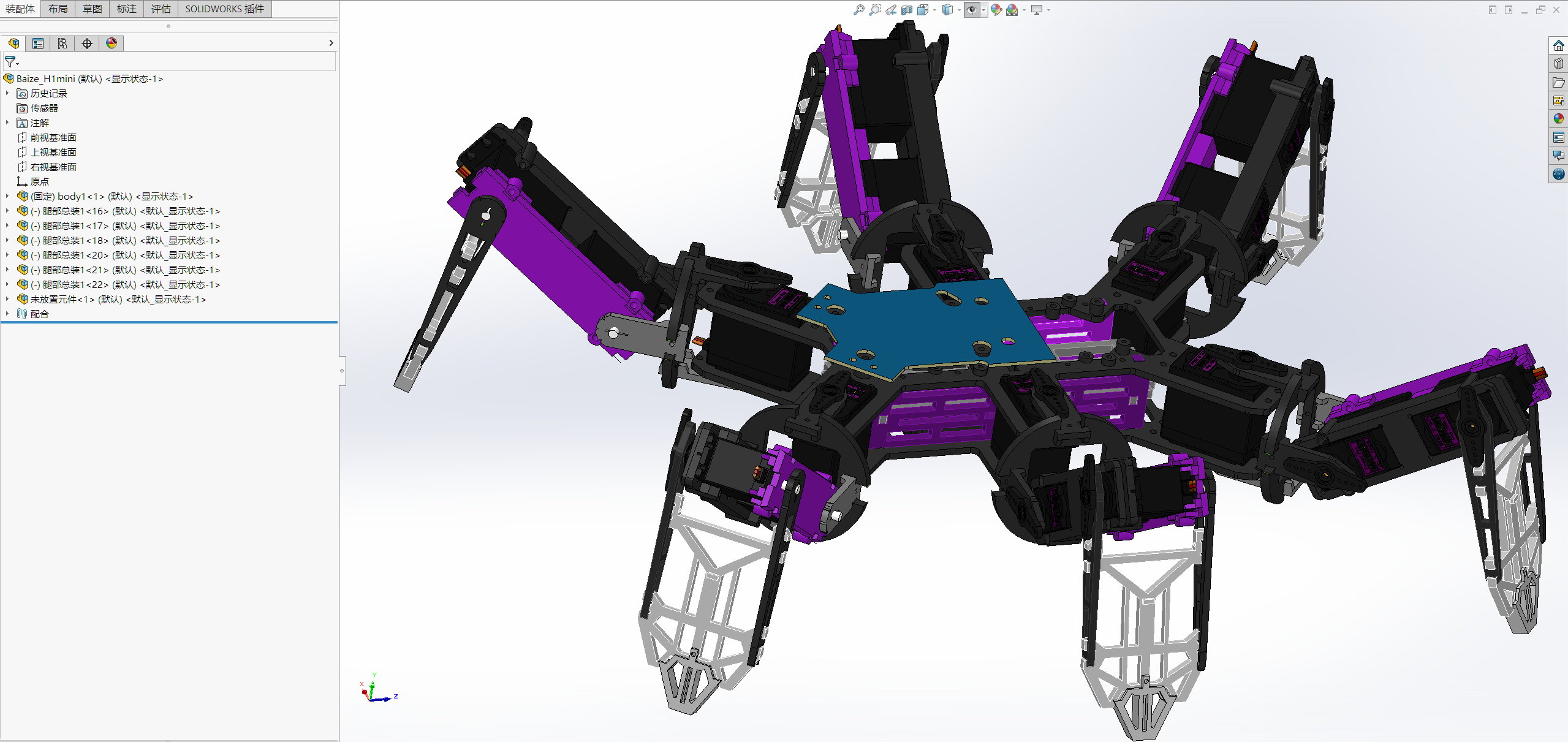
- ✅ 稳定行走,可适应10°斜坡
- ✅ 续航提升至40分钟
- ✅ 可跨越2cm障碍物
- ✅ 支持远程遥控
技术挑战
1. 舵机同步
18个舵机需要精确同步,任何延迟都会导致步态混乱。
解决方案:使用专用舵机驱动板 + 时间戳同步
2. 稳定性控制
六足行走时重心不断变化,需要实时调整。
解决方案:引入陀螺仪反馈 + PID姿态控制
3. 能耗优化
舵机耗电巨大,需要优化功耗。
解决方案:
- 优化步态减少不必要的动作
- 使用高效电源管理模块
- 待机时舵机断电
后续计划
- 添加摄像头视觉导航
- 实现 SLAM 建图功能
- 开发手机 App 远程控制
- 参加机器人竞赛
六足机器人是一个非常适合学习的项目,涉及机械、电子、编程多个领域。如果你也想做一个,欢迎交流!