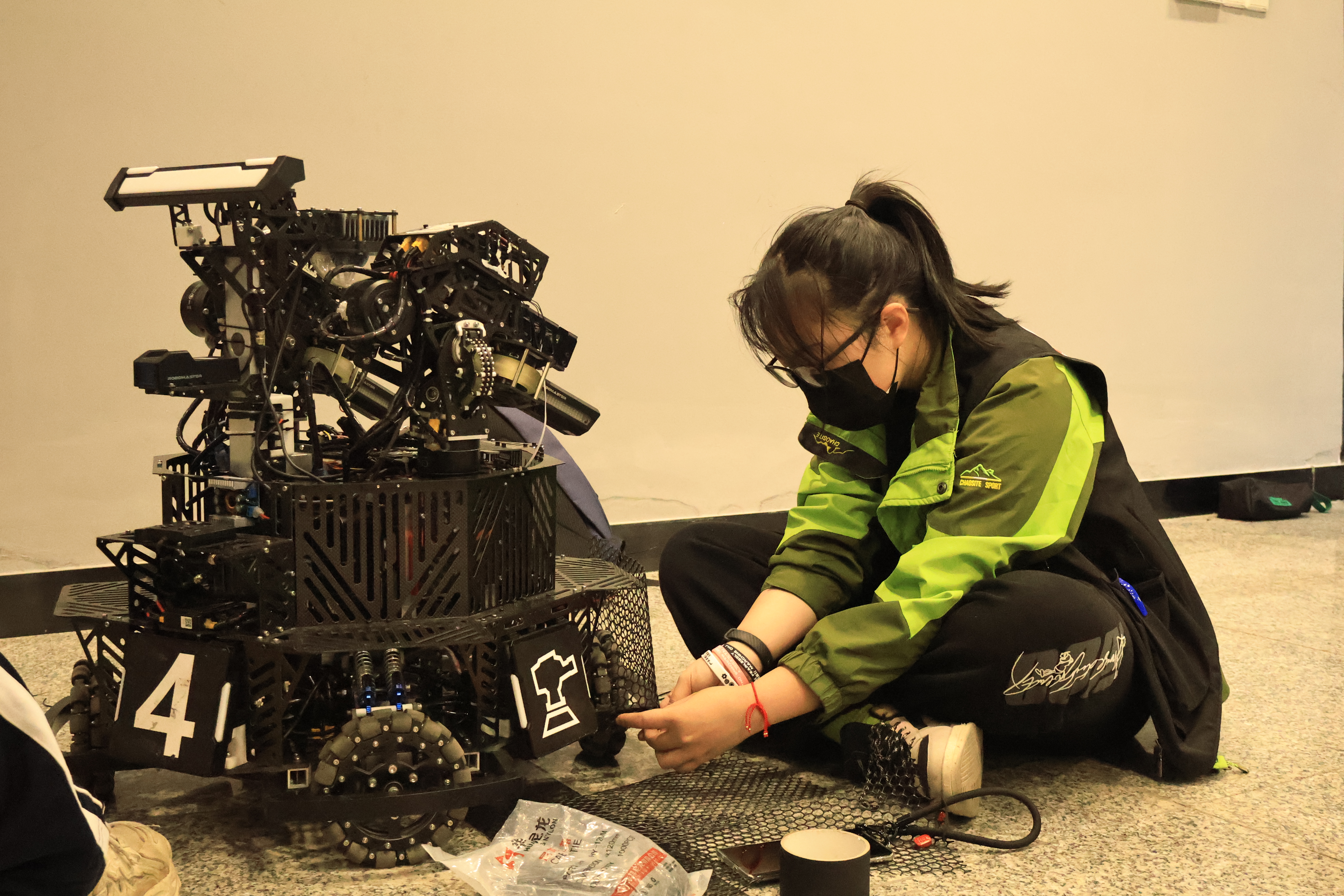
🛡️ 单头哨兵机器人
经典的哨兵机器人配置,结构简洁、性能可靠,
是团队初期开发的核心防御单位。
项目背景
单头哨兵是我们参加 RoboMaster 2023 赛季的主力机器人,虽然只有一个云台,但通过精心优化的算法和机械设计,依然实现了出色的防御能力。

系统架构
硬件组成
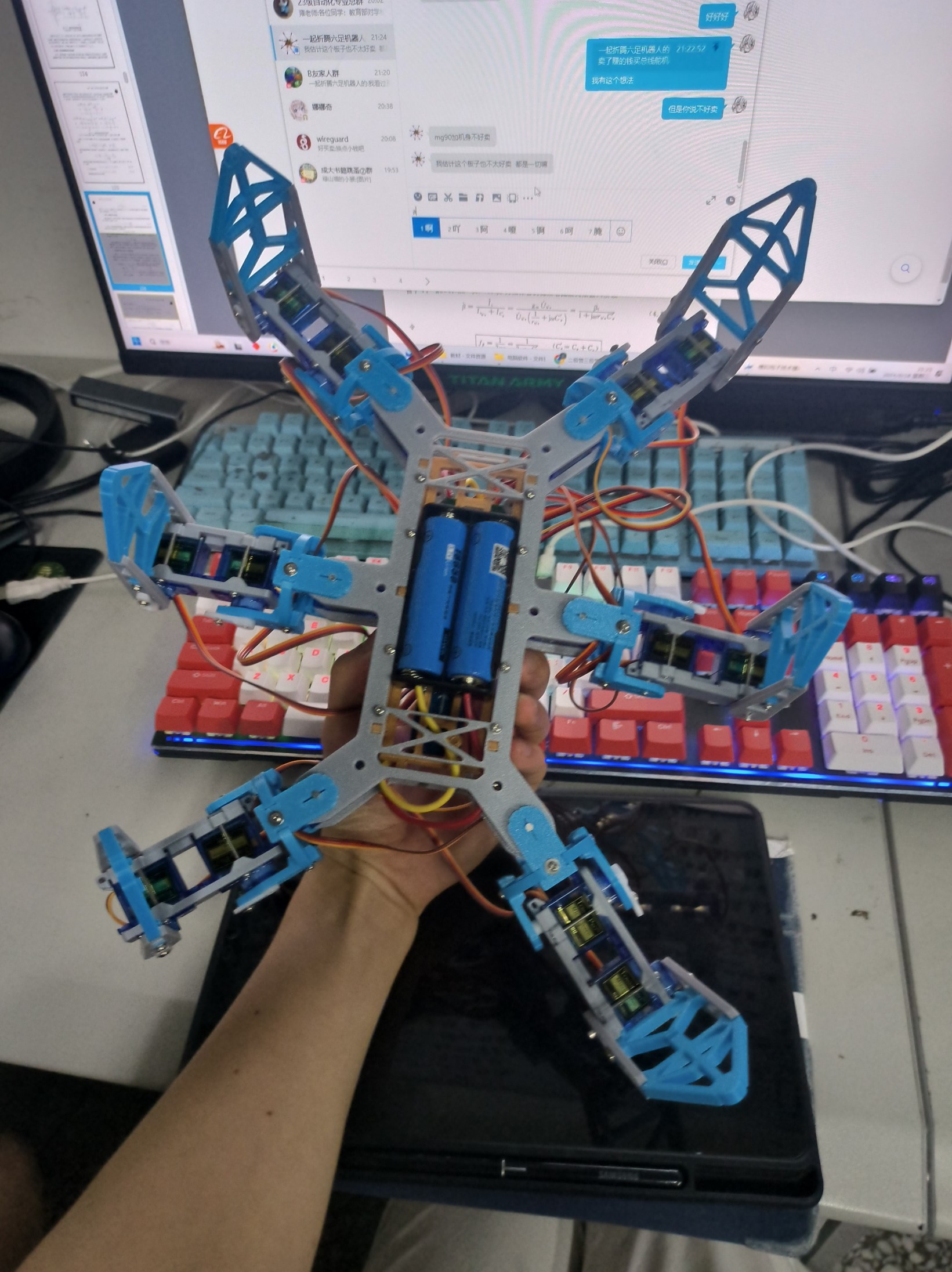
- 云台系统:6020电机驱动,IMU稳定
- 底盘:麦克纳姆轮全向移动
- 视觉模块:工业相机 + Jetson Nano
- 发射机构:双摩擦轮 + 拨弹盘
软件架构
1 | 上位机 (Jetson Nano) |
核心算法
1. 装甲板检测
使用传统视觉 + 深度学习混合方案:
- 颜色分割快速筛选候选区域
- CNN网络精确分类装甲板类型
- 处理速度达到 60fps
2. 云台控制
三环PID控制策略:
- 外环:视觉误差补偿
- 中环:角度闭环控制
- 内环:速度闭环控制
响应时间 <100ms,稳态误差 <0.5°
3. 弹道补偿
考虑重力、空气阻力建立弹道模型:
1 | # 简化的弹道预测 |
性能数据
| 指标 | 数值 |
|---|---|
| 识别距离 | 1-8米 |
| 识别帧率 | 60 fps |
| 命中率 | 78% |
| 云台响应时间 | 95 ms |
| 射速 | 20 发/秒 |
经验总结
单头哨兵项目让我深刻理解了机器人系统的整体性。一个优秀的机器人不仅需要强大的硬件,更需要各个子系统的紧密配合。
从视觉识别到云台控制,从弹道补偿到热量管理,每个环节都需要精心调试。这个项目为后续双头哨兵的开发奠定了坚实基础。

项目源码和技术文档持续更新中,欢迎交流!